如果你也在 怎样代写强化学习Reinforcement Learning这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。
强化学习是一种基于奖励期望行为和/或惩罚不期望行为的机器学习训练方法。一般来说,强化学习代理能够感知和解释其环境,采取行动并通过试验和错误学习。
statistics-lab™ 为您的留学生涯保驾护航 在代写强化学习Reinforcement Learning方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在代写强化学习Reinforcement Learning代写方面经验极为丰富,各种代写强化学习Reinforcement Learning相关的作业也就用不着说。
我们提供的强化学习Reinforcement Learning及其相关学科的代写,服务范围广, 其中包括但不限于:
- Statistical Inference 统计推断
- Statistical Computing 统计计算
- Advanced Probability Theory 高等楖率论
- Advanced Mathematical Statistics 高等数理统计学
- (Generalized) Linear Models 广义线性模型
- Statistical Machine Learning 统计机器学习
- Longitudinal Data Analysis 纵向数据分析
- Foundations of Data Science 数据科学基础
统计代写|强化学习作业代写Reinforcement Learning代考|Replay Buffer and Off-Policy Learning
Off-policy learning involves two separate policies: behavior policy $b(a \mid s)$ to explore and generate examples; and $\pi(a \mid s)$, the target policy that the agent is trying to learn as the optimal policy. Accordingly, we could use the samples generated by the behavior policy again and again to train the agent. The approach makes the process sample efficient as a single transition observed by the agent can be used multiple times.
This is called experience replay. The agent is collecting experiences from the environment and replaying those experiences multiple times as part of the learning process. In experience replay, we store the samples (s, a, $r, s^{\prime}$, done) in a buffer. The samples are generated using an exploratory behavior policy while we improve a deterministic target policy using q-values. Therefore, we can always use older samples from a behavior policy and apply them again and again. We keep the buffer size fixed to
some predetermined size and keep deleting the older samples as we collect new ones. The process makes learning sample efficient by reusing a sample multiple time. The rest of the approach remains the same as an off-policy agent.
Let’s apply this approach to the Q-learning agent. This time we will skip giving the pseudocode as there is hardly any change except for using samples from the replay buffer multiple times in each transition. We store a new transition in the buffer and then sample batch_size samples from the buffer. These samples are used to train the Q-agent in the usual way. The agent then takes another step in the environment, and the cycle begins again. Listing4_6.ipynb gives the implementation of the replay buffer and how it is used in the learning algorithm. See Listing 4-6.
统计代写|强化学习作业代写Reinforcement Learning代考|Q-Learning for Continuous State Spaces
Until now all the examples we have looked at had discrete state spaces. All the methods studied so far could be categorized as tabular methods. The state action space was represented as a matrix with states along one dimension and actions along the cross-axis.
We will soon transition to continuous state spaces and make heavy use of deep learning to represent the state through a neural net. However, we can still solve many of the continuous state problems with some simple approaches. In preparation for the next chapter, let’s look at the simplest approach of converting continuous values into discrete bins. The approach we will take is to round off continuous floating-point numbers with some precision, e.g., for a continuous state space value between $-1$ to 1 being converted into $-1,-0.9,-0.8, \ldots 0,0.1,0.2, \ldots 1.0$.
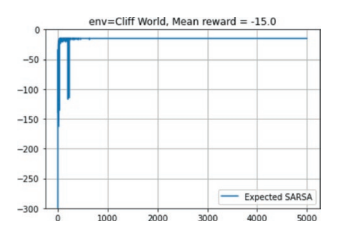
listing4_7.ipynb shows this approach in action. We will continue to use the Qlearning agent, experience reply, and learning algorithm from listing4_6. However, this time we will be applying the learning on a continuous environment, that of CartPole, which was described in detail at the beginning of the chapter. The key change that we need is to receive the state values from environment, discretize the values, and then pass this along to the agent as observations. The agent only gets to see the discrete values and uses these discrete values to learn the optimal policy using QAgent. We reproduce in Listing 4-7 the approach used for converting continuous state values into discrete ones. See Figure 4-19.
统计代写|强化学习作业代写Reinforcement Learning代考|n-Step Returns
In this section, we will unify the MC and TD approaches. MC methods sample the return from a state until the end of the episode, and they do not bootstrap. Accordingly, MC methods cannot be applied for continuing tasks. TD, on the other hand, uses one-step return to estimate the value of the remaining rewards. TD methods take a short view of the trajectory and bootstrap right after one step.
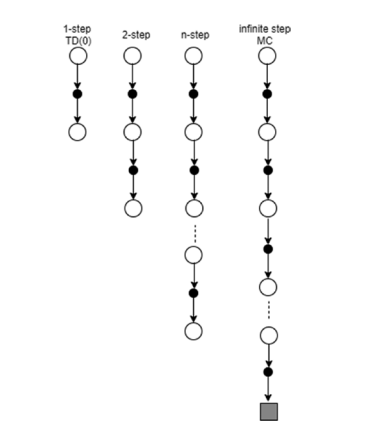
Both the methods are two extremes, and there are many situations when a middleof-the-road approach could produce lot better results. The idea in $n$-step is to use the rewards from the next $\mathrm{n}$ steps and then bootstrap from $\mathrm{n}+1$ step to estimate the value of the remaining rewards. Figure 4-20 shows the backup diagrams for various values of $n$. On one extreme is one-step, which is the $\mathrm{TD}(0)$ method that we just saw in the context of SARSA, Q-learning, and other related approaches. At the other extreme is the $\infty$-step TD, which is nothing but an MC method. The broad idea is to see that the TD and MC methods are two extremes of the same continuum.
强化学习代写
统计代写|强化学习作业代写Reinforcement Learning代考|Replay Buffer and Off-Policy Learning
离策略学习涉及两个独立的策略:行为策略b(一种∣s)探索和生成示例;和圆周率(一种∣s),代理试图学习的目标策略作为最优策略。因此,我们可以一次又一次地使用行为策略生成的样本来训练代理。该方法使流程样本高效,因为代理观察到的单个转换可以多次使用。
这称为经验回放。作为学习过程的一部分,代理正在从环境中收集经验并多次重播这些经验。在体验回放中,我们存储样本 (s, a,r,s′, 完成) 在缓冲区中。样本是使用探索性行为策略生成的,而我们使用 q 值改进确定性目标策略。因此,我们总是可以使用行为策略中的旧样本并一次又一次地应用它们。我们将缓冲区大小固定为
一些预定的大小,并在我们收集新样本时不断删除旧样本。该过程通过多次重用样本来提高学习样本的效率。该方法的其余部分与离策略代理相同。
让我们将这种方法应用于 Q-learning 代理。这次我们将跳过给出伪代码,因为除了在每次转换中多次使用重放缓冲区中的样本之外几乎没有任何变化。我们在缓冲区中存储一个新的转换,然后从缓冲区中采样 batch_size 样本。这些样本用于以通常的方式训练 Q-agent。然后代理在环境中又迈出一步,循环又开始了。Listing4_6.ipynb 给出了重放缓冲区的实现以及它在学习算法中的使用方式。见清单 4-6。
统计代写|强化学习作业代写Reinforcement Learning代考|Q-Learning for Continuous State Spaces
到目前为止,我们看到的所有示例都有离散的状态空间。迄今为止研究的所有方法都可以归类为表格方法。状态动作空间被表示为一个矩阵,其中状态沿一维,动作沿横轴。
我们将很快过渡到连续状态空间,并大量使用深度学习通过神经网络来表示状态。但是,我们仍然可以通过一些简单的方法解决许多连续状态问题。在为下一章做准备时,让我们看看将连续值转换为离散值的最简单方法。我们将采用的方法是以某种精度对连续浮点数进行四舍五入,例如,对于−1为 1 被转换为−1,−0.9,−0.8,…0,0.1,0.2,…1.0.
Listing4_7.ipynb 展示了这种方法的实际应用。我们将继续使用清单4_6中的Qlearning代理、经验回复和学习算法。然而,这一次我们将把学习应用到一个连续的环境中,即 CartPole 的环境中,这在本章的开头已经详细描述过。我们需要的关键更改是从环境接收状态值,离散化这些值,然后将其作为观察值传递给代理。代理只能看到离散值并使用这些离散值来学习使用 QAgent 的最佳策略。我们在清单 4-7 中重现了用于将连续状态值转换为离散值的方法。请参见图 4-19。
统计代写|强化学习作业代写Reinforcement Learning代考|n-Step Returns
在本节中,我们将统一 MC 和 TD 方法。MC 方法对从一个状态返回的样本进行采样,直到剧集结束,并且它们不会引导。因此,MC 方法不能应用于持续的任务。另一方面,TD 使用一步回报来估计剩余奖励的价值。TD 方法在一个步骤后立即查看轨迹和引导程序。
这两种方法都是两个极端,在很多情况下,中间的方法可以产生更好的结果。这个想法在n-step是使用下一个奖励n步骤,然后从n+1步骤来估计剩余奖励的价值。图 4-20 显示了不同值的备份图n. 一个极端是一步,即吨D(0)我们刚刚在 SARSA、Q-learning 和其他相关方法的背景下看到的方法。另一个极端是∞-step TD,这不过是一种 MC 方法。广义的想法是看到 TD 和 MC 方法是同一连续体的两个极端。

统计代写请认准statistics-lab™. statistics-lab™为您的留学生涯保驾护航。
金融工程代写
金融工程是使用数学技术来解决金融问题。金融工程使用计算机科学、统计学、经济学和应用数学领域的工具和知识来解决当前的金融问题,以及设计新的和创新的金融产品。
非参数统计代写
非参数统计指的是一种统计方法,其中不假设数据来自于由少数参数决定的规定模型;这种模型的例子包括正态分布模型和线性回归模型。
广义线性模型代考
广义线性模型(GLM)归属统计学领域,是一种应用灵活的线性回归模型。该模型允许因变量的偏差分布有除了正态分布之外的其它分布。
术语 广义线性模型(GLM)通常是指给定连续和/或分类预测因素的连续响应变量的常规线性回归模型。它包括多元线性回归,以及方差分析和方差分析(仅含固定效应)。
有限元方法代写
有限元方法(FEM)是一种流行的方法,用于数值解决工程和数学建模中出现的微分方程。典型的问题领域包括结构分析、传热、流体流动、质量运输和电磁势等传统领域。
有限元是一种通用的数值方法,用于解决两个或三个空间变量的偏微分方程(即一些边界值问题)。为了解决一个问题,有限元将一个大系统细分为更小、更简单的部分,称为有限元。这是通过在空间维度上的特定空间离散化来实现的,它是通过构建对象的网格来实现的:用于求解的数值域,它有有限数量的点。边界值问题的有限元方法表述最终导致一个代数方程组。该方法在域上对未知函数进行逼近。[1] 然后将模拟这些有限元的简单方程组合成一个更大的方程系统,以模拟整个问题。然后,有限元通过变化微积分使相关的误差函数最小化来逼近一个解决方案。
tatistics-lab作为专业的留学生服务机构,多年来已为美国、英国、加拿大、澳洲等留学热门地的学生提供专业的学术服务,包括但不限于Essay代写,Assignment代写,Dissertation代写,Report代写,小组作业代写,Proposal代写,Paper代写,Presentation代写,计算机作业代写,论文修改和润色,网课代做,exam代考等等。写作范围涵盖高中,本科,研究生等海外留学全阶段,辐射金融,经济学,会计学,审计学,管理学等全球99%专业科目。写作团队既有专业英语母语作者,也有海外名校硕博留学生,每位写作老师都拥有过硬的语言能力,专业的学科背景和学术写作经验。我们承诺100%原创,100%专业,100%准时,100%满意。
随机分析代写
随机微积分是数学的一个分支,对随机过程进行操作。它允许为随机过程的积分定义一个关于随机过程的一致的积分理论。这个领域是由日本数学家伊藤清在第二次世界大战期间创建并开始的。
时间序列分析代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其时间序列是一组按照时间发生先后顺序进行排列的数据点序列。通常一组时间序列的时间间隔为一恒定值(如1秒,5分钟,12小时,7天,1年),因此时间序列可以作为离散时间数据进行分析处理。研究时间序列数据的意义在于现实中,往往需要研究某个事物其随时间发展变化的规律。这就需要通过研究该事物过去发展的历史记录,以得到其自身发展的规律。
回归分析代写
多元回归分析渐进(Multiple Regression Analysis Asymptotics)属于计量经济学领域,主要是一种数学上的统计分析方法,可以分析复杂情况下各影响因素的数学关系,在自然科学、社会和经济学等多个领域内应用广泛。
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。