机器学习代写|流形学习代写manifold data learning代考|Laplacian Eigenmaps with Global Information
如果你也在 怎样代写流形学习manifold data learning这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。
流形学习是机器学习的一个流行且快速发展的子领域,它基于一个假设,即一个人的观察数据位于嵌入高维空间的低维流形上。本文介绍了流形学习的数学观点,深入探讨了核学习、谱图理论和微分几何的交叉点。重点放在图和流形之间的显著相互作用上,这构成了流形正则化技术的广泛使用的基础。
statistics-lab™ 为您的留学生涯保驾护航 在代写流形学习manifold data learning方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在代写流形学习manifold data learning代写方面经验极为丰富,各种代写流形学习manifold data learning相关的作业也就用不着说。
我们提供的流形学习manifold data learning及其相关学科的代写,服务范围广, 其中包括但不限于:
- Statistical Inference 统计推断
- Statistical Computing 统计计算
- Advanced Probability Theory 高等概率论
- Advanced Mathematical Statistics 高等数理统计学
- (Generalized) Linear Models 广义线性模型
- Statistical Machine Learning 统计机器学习
- Longitudinal Data Analysis 纵向数据分析
- Foundations of Data Science 数据科学基础

机器学习代写|流形学习代写manifold data learning代考|LEM Results
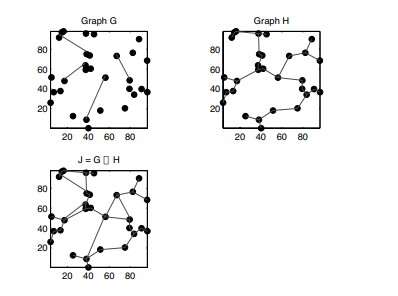
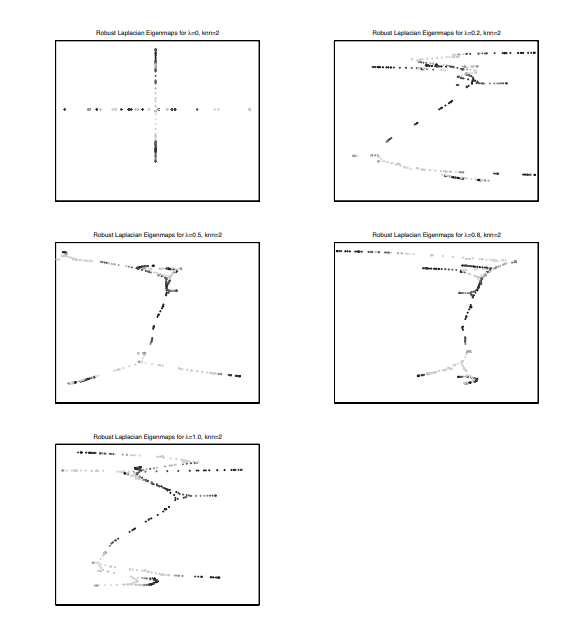
Figures $2.5-2.7$ show the results after using LEM for different values of $k$. As the value of $k$ increases from 1 to higher values we notice the spreading of the embedded data. The bottom subplot shows the nearest neighbor graph with $k=1$ as shown in Figure 2.7. The right plot shows the embedding of the graph. It is interesting to observe how the embedded data loses its local neighborhood information. The embedding practically happens along the second principal eigenvector (the first being Zero Vector). As the value of $k$ is increased to 2, we observe that embedding happens along the second and third principal axes. See Figure 2.7. For $k=1$ the graph is highly disconnected and for $k=2$ the graphs has much less isolated pieces of graphs. One interesting thing to observe is that as the connectivity of the graph increases the low-dimensional representation begins to preserve the local information.
The graph with $k=2$ and its embedding is shown in Figure 2.8. Increasing the neighborhood information to 2 neighbors is still not able to represent the continuity of the original manifold. Figure $2.7$ shows the graph with $k=3$ and its embedding. Increasing the neighborhood information to 3 neighbors better represents the continuity of the original manifold. Figure $2.5$ shows the graph with $k=5$ and its embedding. Increasing the neighborhood information to 5 neighbors better represents the continuity of the original manifold. Similar results are obtained by increasing the the number of neighbors, however, it should be noted that when the number of neighbors is very high then the graph starts to get influenced by ambient neigbhors.
We see similar results for the face images. The three plots in Figure $2.6$ show the embedding results obtained using LEM when the neighborhood graphs are created using $k=1, k=2$, and $k=5$. The top and the middle plot validate the limitation of LEM.
机器学习代写|流形学习代写manifold data learning代考|Bibliographical and Historical Remarks
Dimensionality reduction is an important research area in data analysis with an extensive research literature. Both linear and non-linear methods exist, and each category has both supervised and unsupervised versions. In this section we will briefly mention some of the salient works that have been proposed in the area of locally preserving manifold learning: see $[8]$ for a broader survey.
Lee and Seung [12] showed that many high dimensional data such as a series of related images, video frames, etc. lie on a much lower-dimensional manifold instead of being scattered throughout the feature space. This particular observation has motivated researchers to develop dimension reduction algorithms that try to learn an embedded manifold in a high-dimensional space.
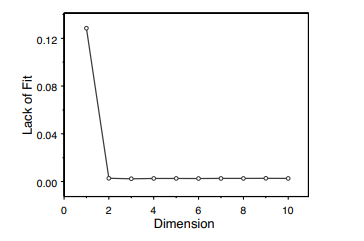
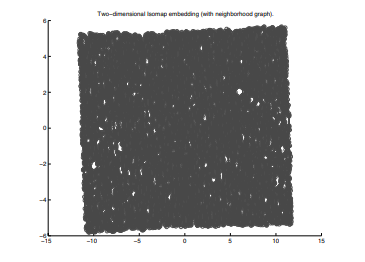
ISOMAP [14] learns the manifold by exploring geodesic distances. In fact the algorithm tries to preserve the geometry of the data on the manifold by noting the points in the neighborhood of each point. The algorithm is defined as such:
- Form a neighborhood graph $G$ for the dataset, based, for instance, on the $K$ nearest neighbors of each point $x_{i}$ –
- For every pair of nodes in the graph, compute the shortest path, using Dijkstras algorithm, as an estimate of intrinsic distance on the data manifold. The weights of edges of the graphs are computed based on the Euclidean distance measure.
- Classical Multi-Dimensional Scaling algorithm is computed using these pairwise distances to find a lower dimensional embedding $y_{i}$.
Bernstein et al. [22] have described the convergence properties of the estimation procedure for the intrinsic distances. For large and dense data sets, computation of pairwise distances is time consuming, and moreover the calculation of eigenvalues can be computationally intensive for large data sets. Such constraints have motivated researchers to find simpler variations of the Isomap algorithm. One such algorithm uses subsampled data called landmarks. Firstly, it calculates Isomap for random points called landmarks and between those landmarks a simple triangulation algorithm is applied.
Locally Linear Embedding (LLE) is an unsupervised learning method based on global and local optimization [11]. It is is similar to Isomap in the sense that it generates a graphical representation of the data set. However, it is different from Isomap as it only attempts to preserve local structures of the data. Because of the locality property used in LLE, the algorithm allows for successful embedding of nonconvex manifolds. An important point to be noted is that LLE creates the local properties of a manifold using the linear combinations of $k$ nearest neighbors of the data $x_{i}$. LLE attempts to create a local regression like model and thereby tries to fit a hyperplane through the data point $x_{i}$. This appears to be reasonable for smooth manifolds where the nearest neighbors align themselves well in a linear space. For very non-smooth or noisy data sets, LLE does not perform well. It has been noted that LLE preserves the reconstruction weights in the space of lower dimensionality, as the reconstruction weights of a data point are invariant to linear transformational operations like translation, rotation, etc.
机器学习代写|流形学习代写manifold data learning代考|Arkadas Ozakin, Nikolaos Vasiloglou II, Alexander Gray
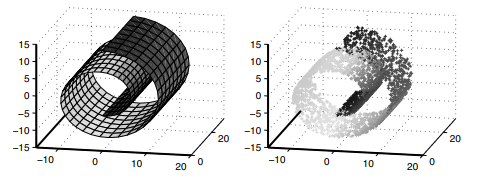
Much of the recent work in manifold learning and nonlinear dimensionality reduction focuses on distance-based methods, i.e., methods that aim to preserve the local or global (geodesic) distances between data points on a submanifold of Euclidean space. While this is a promising approach when the data manifold is known to have no intrinsic curvature (which is the case for common examples such as the “Swiss roll”), classical results in Riemannian geometry show that it is impossible to map a $d$-dimensional data manifold with intrinsic curvature into $\mathbb{R}^{d}$ in a manner that preserves distances. Consequently, distance-based methods of dimensionality reduction distort intrinsically curved data spaces, and they often do so in unpredictable ways. In this chapter, we discuss an alternative paradigm of manifold learning. We show that it is possible to perform nonlinear dimensionality reduction by preserving the underlying density of the data, for a much larger class of data manifolds than intrinsically flat ones, and demonstrate a proof-of-concept algorithm demonstrating the promise of this approach.
Visual inspection of data after dimensional reduction to two or three dimensions is among the most common uses of manifold learning and nonlinear dimensionality reduction. Typically, what is sought by the user’s eye in two or three-dimensional plots is clustering and other relationships in the data. Knowledge of the density, in principle, allows one to identify such basic structures as clusters and outliers, and even define nonparametric classifiers; the underlying density of a data set is arguably one of the most fundamental statistical objects that describe it. Thus, a method of dimensionality reduction that is guaranteed to preserve densities may well be preferable to methods that aim to preserve distances, but end up distorting them in uncontrolled ways.
Many of the manifold learning methods require the user to set a neighborhood radius $h$, or, for $k$-nearest neighbor approaches, a positive integer $k$, to be used in determining the neighborhood graph. Most of the time, there is no automatic way to pick the appropriate values of the tweak parameters $h$ and $k$, and one resorts to trial and error, looking for values that result in reasonable-looking plots. Kernel density estimation, one of the most popular and useful methods of estimating the underlying density of a data set, comes with a natural way to choose $h$ or $k$; it suggests to us to pick the value that maximizes a cross-validation score for the density estimate. While the usual kernel density estimation does not allow one to estimate the density of data on submanifolds of Euclidean space, a small modification
allows one to do so. This modification and its ramifications are discussed below in the context of density-preserving maps.
The chapter is organized as follows. In Section 3.2, using a theorem of Moser, we prove the existence of density preserving maps into $\mathbb{R}^{d}$ for a large class of $d$-dimensional manifolds, and give an intuitive discussion on the nonuniqueness of such maps. In Section 3.3, we describe a method for estimating the underlying density of a data set on a Riemannian submanifold of Euclidean space. We state the main result on the consistency of this submanifold density estimator, and give a bound on its convergence rate, showing that the latter is determined by the intrinsic dimensionality of the data instead of the full dimensionality of the feature space. This, incidentally, shows that the curse of dimensionality in the widely-used method of kernel density estimation is not as severe as is generally believed, if the method is properly modified for data on submanifolds. In Section 3.4, using a modified version of the estimator defined in Section 3.3, we describe a proof-of-concept algorithm for density preserving maps based on semidefinite programming, and give experimental results. Finally, in Sections $7.7$ and 3.6, we summarize the chapter and discuss relevant bibliography.
流形学习代写
机器学习代写|流形学习代写manifold data learning代考|LEM Results
数据2.5−2.7显示使用 LEM 处理不同值后的结果ķ. 作为价值ķ从 1 增加到更高的值,我们注意到嵌入数据的传播。底部子图显示最近邻图ķ=1如图 2.7 所示。右图显示了图形的嵌入。观察嵌入数据如何丢失其本地邻域信息是很有趣的。嵌入实际上沿着第二个主特征向量(第一个是零向量)发生。作为价值ķ增加到 2,我们观察到嵌入发生在第二和第三主轴上。请参见图 2.7。为了ķ=1该图高度不连贯,并且对于ķ=2这些图的孤立图块要少得多。要观察的一件有趣的事情是,随着图的连通性增加,低维表示开始保留局部信息。
该图与ķ=2其嵌入如图 2.8 所示。将邻域信息增加到 2 个邻居仍然无法表示原始流形的连续性。数字2.7显示图表ķ=3及其嵌入。将邻域信息增加到 3 个邻居更好地代表了原始流形的连续性。数字2.5显示图表ķ=5及其嵌入。将邻域信息增加到 5 个邻居更好地代表了原始流形的连续性。通过增加邻居的数量可以获得类似的结果,但是应该注意的是,当邻居的数量非常高时,图开始受到环境邻居的影响。
我们看到面部图像的类似结果。图中的三个地块2.6显示使用 LEM 创建邻域图时使用 LEM 获得的嵌入结果ķ=1,ķ=2, 和ķ=5. 上图和中图验证了 LEM 的局限性。
机器学习代写|流形学习代写manifold data learning代考|Bibliographical and Historical Remarks
降维是数据分析中的一个重要研究领域,具有广泛的研究文献。线性和非线性方法都存在,每个类别都有监督和无监督版本。在本节中,我们将简要提及在局部保留流形学习领域提出的一些突出工作:参见[8]进行更广泛的调查。
Lee 和 Seung [12] 表明,许多高维数据(例如一系列相关图像、视频帧等)位于低得多的流形上,而不是分散在整个特征空间中。这一特殊观察促使研究人员开发降维算法,试图在高维空间中学习嵌入式流形。
ISOMAP [14] 通过探索测地距离来学习流形。事实上,该算法试图通过注意每个点附近的点来保留流形上数据的几何形状。算法定义如下:
- 形成邻域图G对于数据集,例如,基于ķ每个点的最近邻X一世 –
- 对于图中的每一对节点,使用 Dijkstras 算法计算最短路径,作为数据流形上内在距离的估计。图的边权重是根据欧几里得距离度量计算的。
- 使用这些成对距离计算经典的多维缩放算法以找到较低维的嵌入是一世.
伯恩斯坦等人。[22]已经描述了内在距离估计过程的收敛特性。对于大而密集的数据集,成对距离的计算非常耗时,而且对于大数据集,特征值的计算可能是计算密集型的。这种约束促使研究人员寻找 Isomap 算法的更简单的变体。一种这样的算法使用称为地标的二次采样数据。首先,它为称为界标的随机点计算 Isomap,并在这些界标之间应用简单的三角测量算法。
局部线性嵌入 (LLE) 是一种基于全局和局部优化的无监督学习方法 [11]。在生成数据集的图形表示方面,它类似于 Isomap。但是,它与 Isomap 不同,因为它仅尝试保留数据的局部结构。由于 LLE 中使用的局部性属性,该算法允许成功嵌入非凸流形。需要注意的重要一点是,LLE 使用以下的线性组合创建流形的局部属性ķ数据的最近邻X一世. LLE 尝试创建类似于模型的局部回归,从而尝试通过数据点拟合超平面X一世. 这对于最近的邻居在线性空间中很好地对齐的平滑流形来说似乎是合理的。对于非常不平滑或嘈杂的数据集,LLE 表现不佳。已经注意到,LLE 保留了低维空间中的重建权重,因为数据点的重建权重对于平移、旋转等线性变换操作是不变的。
机器学习代写|流形学习代写manifold data learning代考|Arkadas Ozakin, Nikolaos Vasiloglou II, Alexander Gray
最近在流形学习和非线性降维方面的大部分工作都集中在基于距离的方法上,即旨在保持欧几里得空间子流形上数据点之间的局部或全局(测地线)距离的方法。当已知数据流形没有内在曲率时,这是一种很有前途的方法(常见的例子就是“瑞士卷”),黎曼几何中的经典结果表明,不可能映射一个d具有内在曲率的维数据流形Rd以保持距离的方式。因此,基于距离的降维方法扭曲了本质上弯曲的数据空间,并且它们通常以不可预测的方式这样做。在本章中,我们将讨论流形学习的另一种范式。我们展示了通过保留数据的基础密度来执行非线性降维是可能的,对于比本质上平坦的数据流形更大的数据流形类别,并演示了一种概念验证算法,证明了这种方法的前景。
降维到二维或三维后的数据视觉检查是流形学习和非线性降维的最常见用途之一。通常,用户在二维或三维图中寻找的是数据中的聚类和其他关系。原则上,对密度的了解可以让人们识别诸如簇和异常值之类的基本结构,甚至可以定义非参数分类器;数据集的潜在密度可以说是描述它的最基本的统计对象之一。因此,保证保持密度的降维方法可能比旨在保持距离但最终以不受控制的方式扭曲它们的方法更可取。
许多流形学习方法需要用户设置邻域半径H, 或者, 对于ķ-最近邻方法,一个正整数ķ,用于确定邻域图。大多数时候,没有自动方法来选择调整参数的适当值H和ķ,并且一个人诉诸试验和错误,寻找导致看起来合理的图的值。核密度估计是估计数据集底层密度的最流行和最有用的方法之一,它提供了一种自然的选择方式H或者ķ; 它建议我们选择最大化密度估计的交叉验证分数的值。虽然通常的核密度估计不允许人们估计欧几里得空间子流形上的数据密度,但一个小的修改
允许这样做。这种修改及其后果将在下面的密度保持地图的背景下讨论。
本章组织如下。在第 3.2 节中,使用 Moser 定理,我们证明了密度保持映射的存在Rd对于一大类d维流形,并直观地讨论此类映射的非唯一性。在 3.3 节中,我们描述了一种估计欧几里得空间的黎曼子流形上数据集的潜在密度的方法。我们陈述了这个子流形密度估计器一致性的主要结果,并给出了它的收敛速度的界限,表明后者是由数据的固有维度而不是特征空间的全维度决定的。顺便说一句,这表明,如果对子流形数据进行适当修改,则广泛使用的核密度估计方法中的维数灾难并不像通常认为的那么严重。在第 3.4 节中,使用第 3.3 节中定义的估计器的修改版本,我们描述了一种基于半定规划的密度保持图的概念验证算法,并给出了实验结果。最后,在部分7.73.6,我们总结本章并讨论相关参考书目。

统计代写请认准statistics-lab™. statistics-lab™为您的留学生涯保驾护航。
金融工程代写
金融工程是使用数学技术来解决金融问题。金融工程使用计算机科学、统计学、经济学和应用数学领域的工具和知识来解决当前的金融问题,以及设计新的和创新的金融产品。
非参数统计代写
非参数统计指的是一种统计方法,其中不假设数据来自于由少数参数决定的规定模型;这种模型的例子包括正态分布模型和线性回归模型。
广义线性模型代考
广义线性模型(GLM)归属统计学领域,是一种应用灵活的线性回归模型。该模型允许因变量的偏差分布有除了正态分布之外的其它分布。
术语 广义线性模型(GLM)通常是指给定连续和/或分类预测因素的连续响应变量的常规线性回归模型。它包括多元线性回归,以及方差分析和方差分析(仅含固定效应)。
有限元方法代写
有限元方法(FEM)是一种流行的方法,用于数值解决工程和数学建模中出现的微分方程。典型的问题领域包括结构分析、传热、流体流动、质量运输和电磁势等传统领域。
有限元是一种通用的数值方法,用于解决两个或三个空间变量的偏微分方程(即一些边界值问题)。为了解决一个问题,有限元将一个大系统细分为更小、更简单的部分,称为有限元。这是通过在空间维度上的特定空间离散化来实现的,它是通过构建对象的网格来实现的:用于求解的数值域,它有有限数量的点。边界值问题的有限元方法表述最终导致一个代数方程组。该方法在域上对未知函数进行逼近。[1] 然后将模拟这些有限元的简单方程组合成一个更大的方程系统,以模拟整个问题。然后,有限元通过变化微积分使相关的误差函数最小化来逼近一个解决方案。
tatistics-lab作为专业的留学生服务机构,多年来已为美国、英国、加拿大、澳洲等留学热门地的学生提供专业的学术服务,包括但不限于Essay代写,Assignment代写,Dissertation代写,Report代写,小组作业代写,Proposal代写,Paper代写,Presentation代写,计算机作业代写,论文修改和润色,网课代做,exam代考等等。写作范围涵盖高中,本科,研究生等海外留学全阶段,辐射金融,经济学,会计学,审计学,管理学等全球99%专业科目。写作团队既有专业英语母语作者,也有海外名校硕博留学生,每位写作老师都拥有过硬的语言能力,专业的学科背景和学术写作经验。我们承诺100%原创,100%专业,100%准时,100%满意。
随机分析代写
随机微积分是数学的一个分支,对随机过程进行操作。它允许为随机过程的积分定义一个关于随机过程的一致的积分理论。这个领域是由日本数学家伊藤清在第二次世界大战期间创建并开始的。
时间序列分析代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其时间序列是一组按照时间发生先后顺序进行排列的数据点序列。通常一组时间序列的时间间隔为一恒定值(如1秒,5分钟,12小时,7天,1年),因此时间序列可以作为离散时间数据进行分析处理。研究时间序列数据的意义在于现实中,往往需要研究某个事物其随时间发展变化的规律。这就需要通过研究该事物过去发展的历史记录,以得到其自身发展的规律。
回归分析代写
多元回归分析渐进(Multiple Regression Analysis Asymptotics)属于计量经济学领域,主要是一种数学上的统计分析方法,可以分析复杂情况下各影响因素的数学关系,在自然科学、社会和经济学等多个领域内应用广泛。
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。