如果你也在 怎样代写贝叶斯统计这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。
贝叶斯统计学是一个使用概率的数学语言来描述认识论的不确定性的系统。在 “贝叶斯范式 “中,对自然状态的相信程度是明确的;这些程度是非负的,而对所有自然状态的总相信是固定的。
statistics-lab™ 为您的留学生涯保驾护航 在代写贝叶斯统计方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在代写贝叶斯统计代写方面经验极为丰富,各种代写贝叶斯统计相关的作业也就用不着说。
我们提供的贝叶斯统计及其相关学科的代写,服务范围广, 其中包括但不限于:
- Statistical Inference 统计推断
- Statistical Computing 统计计算
- Advanced Probability Theory 高等概率论
- Advanced Mathematical Statistics 高等数理统计学
- (Generalized) Linear Models 广义线性模型
- Statistical Machine Learning 统计机器学习
- Longitudinal Data Analysis 纵向数据分析
- Foundations of Data Science 数据科学基础
统计代写|贝叶斯统计代写beyesian statistics代考|Isotropy
So far the semi-variogram $\gamma(\mathbf{h})$, or the covariance function $C(\mathbf{h})$, has been assumed to depend on the multidimensional $h$. This is very general and too broad, giving the modeler a tremendous amount of flexibility regarding the stochastic process as it varies over the spatial domain, $\mathbb{D}$. However, this flexibility throws upon a lot of burdens arising from the requirement of precise specification of the dependence structure as the process travels from one location to the next. That is, the function $C(\mathbf{h})$ needs to be specified for every possible value of multidimensional h. Not only is this problematic from the purposes of model specification, but also it is hard to estimate all such precise features from data. Hence, the concept of isotropy is introduced to simplify the specification.
A covariance function $C(\mathbf{h})$ is said to be isotropic if it depends only on the length $|\mathbf{h}|$ of the separation vector $\mathbf{h}$. Isotropic covariance functions only depend on the distance but not on the angle or direction of travel. Assuming space to be in two dimensions, an isotropic covariance function guarantees that the covariance between two random variables, one at the center of a circle and the other at any point on the circumference is the same as the covariance between the two random variables one at the center and another at other point on the circumference of the same circle. Thus, the covariance does not depend on where and which direction the random variables are recorded on the circumference of the circle. Hence, such covariance functions are called omni-directional.
Abusing notations an isotropic covariance function, $C(\cdot)$ is denoted by $C(|\mathbf{h}|))$ or simply by $C(d)$ where $d \geq 0$ is a scalar distance between two locations. The notation $C(\cdot)$ has been abused here since earlier we talked about $C(\mathbf{h})$ where $\mathbf{h}$ is a multi-dimensional separation vector, but now the same $C$ is used to denote the one-dimensional covariance function $C(d)$. A covariance function is called anisotropic if it is not isotropic.
In practice it may seem that the isotropic covariance functions are too restrictive as they are rigid in not allowing flexible covariance structure for the underlying stochastic process. For example, a pollution plume can only spread through using the prevailing wind direction, e.g. east-west. Indeed, this is true, and often, the assumption of isotropy is seen as a limitation of the modeling work. However, the overwhelming simplicity still trumps all the disadvantages, and isotropic covariance functions are used for the underlying true error process. Many mathematical constructs and practical tricks are used to build anisotropic covariance functions, see e.g. Chapter 3 of Banerjee et al. $(2015)$.
统计代写|贝叶斯统计代写beyesian statistics代考|Matèrn covariance function
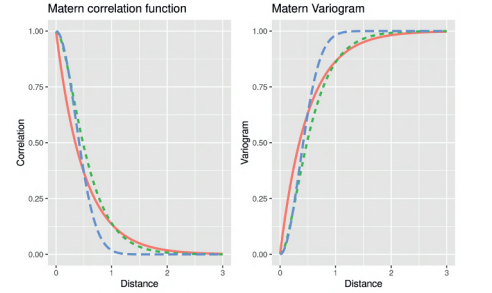
In practical modeling work we need to explicitly specify a particular covariance function so that the likelihood function can be written for the purposes of parameter estimation. In this section we discuss the most commonly used covariance function, namely the Matèrn family (Matérn, 1986) of covariance functions as an example of isotropic covariance functions. We discuss its special cases, such as the exponential and Gaussian. To proceed further recall from elementary definitions that covariance is simply variance times correlation if the two random variables (for which covariance is calculated) have the same variance. In spatial and spatio-temporal modeling, we assume equal spatial variance, which we denote by $\sigma^{2}$. Isotropic covariance functions depend on the distance between two locations, which we denote by $d$. Thus, the covariance function we are about to introduce will have the form
$$
C(d)=\sigma^{2} \rho(d), d>0
$$
where $\rho(d)$ is the correlation function. Note also that when $d=0$, the covariance is the same as the variance and should be equal to $\sigma^{2}$. Indeed, we shall assume that $\rho(d) \rightarrow 1$ as $d \rightarrow 0$. Henceforth we will only discuss covariance functions in the domain when $d>0$.
How should the correlation functions behave as the distance $d$ increases? For most natural and environmental processes, the correlation should decay with increasing $d$. Indeed, the Tobler’s first law of Geography (Tobler, 1970) states that, “everything is related to everything else, but near things are more related than distant things.” Indeed, there are stochastic processes where we may want to assume no correlation at all for any distance $d$ above a threshold value. Although this sounds very attractive and intuitively simple there are technical difficulties in modeling associated with this approach since an arbitrary covariance function may violate the requirement of non-negative definiteness of the variances. More about this requirement is discussed below in Section 2.7. There are mathematically valid ways to specify negligible amounts of correlations for large distances. See for example, the method of tapering discussed by Kaufman et al. (2008).
Usually, the correlation function $\rho(d)$ should monotonically decrease with increasing value of $d$ due to the Tobler’s law stated above. The particular value of $d$, say $d_{0}$, which is a solution of the equation $\rho(d)=0$ is called the range. This implies that the correlation is exactly zero between any two random observations observed at least the range $d_{0}$ distance apart. Note that due to the monotonicity of the correlation function, it cannot climb up once it reaches the value zero for some value of the distance $d$. With the added assumption of Gaussianity for the data, the range $d_{0}$ is the minimum distance beyond which any two random observations are deemed to be independent. With such assumptions we claim that the underlying process does not get affected by the same process, which is taking place at least $d_{0}$ distance away.
统计代写|贝叶斯统计代写beyesian statistics代考|Gaussian processes
Often Gaussian processes are assumed as components in spatial and spatiotemporal modeling. These stochastic processes are defined over a continuum, e.g. a spatial study region and specifying the resulting infinite dimensional random variable is often a challenge in practice. Gaussian processes are very convenient to work in these settings since they are fully defined by a mean function, say $\mu(\mathrm{s})$ and a valid covariance function, say $C\left(\left|\mathbf{s}-\mathbf{s}^{}\right|\right)=\operatorname{Cov}\left(Y(\mathbf{s}), Y\left(\mathbf{s}^{}\right)\right)$, which is required to be positive definite. A covariance function is said to be positive definite if the covariance matrix, implied by that covariance function, for a finite number of random variables belonging to that process is positive definite.
Suppose that the stochastic process $Y($ s ), defined over a continuous spatial region $\mathbb{D}$, is assumed to be a GP with mean function $\mu(\mathrm{s})$ and covariance function $C\left(\mathbf{s}, \mathbf{s}^{*}\right)$. Note that since $s$ is any point in $\mathbb{D}$, the process $Y$ (s) defines a non-countably infinite number of random variables. However, in practice
the GP assumption guarantees that for any finite $n$ and any set of $n$ locations $\mathbf{s}{1}, \ldots, \mathbf{s}{n}$ within $\mathbb{D}$ the $n$-variate random variable $\mathbf{Y}=\left(Y\left(\mathbf{s}{1}\right), \ldots, Y\left(\mathbf{s}{n}\right)\right)$ is normally distributed with mean $\boldsymbol{\mu}$ and covariance matrix $\Sigma$ given by:
$$
\boldsymbol{\mu}=\left(\begin{array}{c}
\mu\left(\mathbf{s}{1}\right) \ \mu\left(\mathbf{s}{2}\right) \
\vdots \
\mu\left(\mathbf{s}{n}\right) \end{array}\right), \quad \Sigma=\left(\begin{array}{cccc} C(0) & C\left(d{12}\right) & \cdots & C\left(d_{1 n}\right) \
C\left(d_{21}\right) & C(0) & \cdots & C\left(d_{2 n}\right) \
\vdots & \vdots & \ddots & \vdots \
C\left(d_{n 1}\right) & C\left(d_{n 2}\right) & \cdots & C(0)
\end{array}\right)
$$
where $d_{i j}=\left|\mathbf{s}{i}-\mathbf{s}{j}\right|$ is the distance between the two locations $\mathbf{s}{i}$ and $\mathbf{s}{j}$. From the multivariate normal distribution in Section A.1 in Appendix A, we can immediately write down the joint density of $\mathbf{Y}$ for any finite value of $n$. However, the unresolved matter is how do we specify the two functions $\mu\left(\mathbf{s}{i}\right)$ and $C\left(d{i j}\right)$ for any $i$ and $j$. The GP assumption is often made for the error process just as in usual regression modeling the error distribution is assumed to be Gaussian. Hence often a GP assumption comes with $\mu(\mathbf{s})=0$ for all s. The next most common assumption is to assume the Matèrn covariance function $C\left(d_{i j} \mid \psi\right)$ written down in $(2.1)$ for $C\left(d_{i j}\right)$. The Matèrn family provides a valid family of positive definite covariance functions, and it is the only family used in this book.
贝叶斯统计代写
统计代写|贝叶斯统计代写beyesian statistics代考|Isotropy
到目前为止,半变异函数C(H),或协方差函数C(H), 已假定依赖于多维H. 这是非常笼统且过于宽泛的,给建模者关于随机过程的巨大灵活性,因为它在空间域上变化,D. 然而,当过程从一个位置移动到下一个位置时,这种灵活性会带来很多负担,因为需要精确指定依赖结构。也就是说,函数C(H)需要为多维 h 的每个可能值指定。这不仅从模型规范的目的来看是有问题的,而且很难从数据中估计所有这些精确的特征。因此,引入了各向同性的概念以简化规范。
协方差函数C(H)如果仅取决于长度,则称其为各向同性的|H|分离向量的H. 各向同性协方差函数仅取决于距离,而不取决于行进的角度或方向。假设空间是二维的,各向同性协方差函数保证两个随机变量之间的协方差,一个在圆的中心,另一个在圆周上的任意点,与两个随机变量之间的协方差相同。中心和另一个在同一圆的圆周上的其他点。因此,协方差不取决于随机变量记录在圆周上的位置和方向。因此,这种协方差函数被称为全向的。
滥用符号一个各向同性的协方差函数,C(⋅)表示为C(|H|))或简单地通过C(d)在哪里d≥0是两个位置之间的标量距离。符号C(⋅)自从我们之前谈到的以来一直在这里被滥用C(H)在哪里H是一个多维分离向量,但现在一样C用于表示一维协方差函数C(d). 如果协方差函数不是各向同性的,则称为各向异性。
在实践中,各向同性协方差函数似乎过于严格,因为它们在不允许潜在随机过程的灵活协方差结构方面是刚性的。例如,污染羽流只能通过使用盛行风向传播,例如东西向。事实上,这是真的,而且通常各向同性的假设被视为建模工作的限制。然而,压倒性的简单性仍然胜过所有的缺点,并且各向同性协方差函数用于潜在的真实误差过程。许多数学结构和实用技巧用于构建各向异性协方差函数,例如参见 Banerjee 等人的第 3 章。(2015).
统计代写|贝叶斯统计代写beyesian statistics代考|Matèrn covariance function
在实际建模工作中,我们需要明确指定特定的协方差函数,以便可以编写似然函数以用于参数估计。在本节中,我们将讨论最常用的协方差函数,即协方差函数的 Matèrn 族 (Matérn, 1986),作为各向同性协方差函数的一个例子。我们讨论它的特殊情况,例如指数和高斯。从基本定义中进一步回忆,如果两个随机变量(为其计算协方差)具有相同的方差,则协方差只是方差乘以相关性。在空间和时空建模中,我们假设空间方差相等,我们表示为σ2. 各向同性协方差函数取决于两个位置之间的距离,我们表示为d. 因此,我们即将介绍的协方差函数将具有以下形式
C(d)=σ2ρ(d),d>0
在哪里ρ(d)是相关函数。另请注意,当d=0,协方差与方差相同,应等于σ2. 事实上,我们应该假设ρ(d)→1作为d→0. 以后我们将只讨论域中的协方差函数d>0.
相关函数应如何表现为距离d增加?对于大多数自然和环境过程,相关性应该随着增加而衰减d. 事实上,托布勒的第一地理定律(托布勒,1970 年)指出,“一切都与其他一切相关,但近处的事物比远处的事物更相关。” 确实,存在随机过程,我们可能希望假设任何距离都没有相关性d高于阈值。尽管这听起来非常有吸引力且直观简单,但与此方法相关的建模存在技术困难,因为任意协方差函数可能违反方差非负确定性的要求。下文第 2.7 节讨论了有关此要求的更多信息。有数学上有效的方法可以为大距离指定可忽略的相关量。例如,参见 Kaufman 等人讨论的锥形化方法。(2008 年)。
通常,相关函数ρ(d)应该随着值的增加而单调减少d由于上述托布勒定律。的特殊价值d, 说d0,这是方程的解ρ(d)=0称为范围。这意味着至少在范围内观察到的任何两个随机观测值之间的相关性恰好为零d0距离。请注意,由于相关函数的单调性,一旦达到某个距离值的零值,它就无法爬升d. 加上对数据的高斯假设,范围d0是任何两个随机观察被认为是独立的最小距离。有了这样的假设,我们声称底层过程不会受到相同过程的影响,至少正在发生d0距离。
统计代写|贝叶斯统计代写beyesian statistics代考|Gaussian processes
高斯过程通常被假定为空间和时空建模的组成部分。这些随机过程是在一个连续统一体上定义的,例如一个空间研究区域,并且指定生成的无限维随机变量在实践中通常是一个挑战。高斯过程在这些设置中工作非常方便,因为它们完全由平均函数定义,例如μ(s)和一个有效的协方差函数,比如说C(|s−s|)=这(是(s),是(s)),它必须是正定的。如果协方差函数隐含的协方差矩阵对于属于该过程的有限数量的随机变量是正定的,则称协方差函数是正定的。
假设随机过程是(s ),定义在一个连续的空间区域上D, 假设为具有均值函数的 GPμ(s)和协方差函数C(s,s∗). 请注意,由于s是任何一点D, 过程是(s) 定义了不可数的无限数量的随机变量。然而,在实践中
GP 假设保证对于任何有限n和任何一组n地点s1,…,sn之内D这n- 变量随机变量是=(是(s1),…,是(sn))正态分布,均值μ和协方差矩阵Σ给出:
μ=(μ(s1) μ(s2) ⋮ μ(sn)),Σ=(C(0)C(d12)⋯C(d1n) C(d21)C(0)⋯C(d2n) ⋮⋮⋱⋮ C(dn1)C(dn2)⋯C(0))
在哪里d一世j=|s一世−sj|是两个位置之间的距离s一世和sj. 根据附录 A 中 A.1 节的多元正态分布,我们可以立即写下是对于任何有限值n. 但是,未解决的问题是我们如何指定这两个函数μ(s一世)和C(d一世j)对于任何一世和j. GP 假设通常用于误差过程,就像在通常的回归建模中假设误差分布是高斯分布一样。因此,通常伴随着 GP 假设μ(s)=0对于所有 s。下一个最常见的假设是假设 Matèrn 协方差函数C(d一世j∣ψ)写在(2.1)为了C(d一世j). Matèrn 族提供了一个有效的正定协方差函数族,它是本书中唯一使用的族。

统计代写请认准statistics-lab™. statistics-lab™为您的留学生涯保驾护航。
金融工程代写
金融工程是使用数学技术来解决金融问题。金融工程使用计算机科学、统计学、经济学和应用数学领域的工具和知识来解决当前的金融问题,以及设计新的和创新的金融产品。
非参数统计代写
非参数统计指的是一种统计方法,其中不假设数据来自于由少数参数决定的规定模型;这种模型的例子包括正态分布模型和线性回归模型。
广义线性模型代考
广义线性模型(GLM)归属统计学领域,是一种应用灵活的线性回归模型。该模型允许因变量的偏差分布有除了正态分布之外的其它分布。
术语 广义线性模型(GLM)通常是指给定连续和/或分类预测因素的连续响应变量的常规线性回归模型。它包括多元线性回归,以及方差分析和方差分析(仅含固定效应)。
有限元方法代写
有限元方法(FEM)是一种流行的方法,用于数值解决工程和数学建模中出现的微分方程。典型的问题领域包括结构分析、传热、流体流动、质量运输和电磁势等传统领域。
有限元是一种通用的数值方法,用于解决两个或三个空间变量的偏微分方程(即一些边界值问题)。为了解决一个问题,有限元将一个大系统细分为更小、更简单的部分,称为有限元。这是通过在空间维度上的特定空间离散化来实现的,它是通过构建对象的网格来实现的:用于求解的数值域,它有有限数量的点。边界值问题的有限元方法表述最终导致一个代数方程组。该方法在域上对未知函数进行逼近。[1] 然后将模拟这些有限元的简单方程组合成一个更大的方程系统,以模拟整个问题。然后,有限元通过变化微积分使相关的误差函数最小化来逼近一个解决方案。
tatistics-lab作为专业的留学生服务机构,多年来已为美国、英国、加拿大、澳洲等留学热门地的学生提供专业的学术服务,包括但不限于Essay代写,Assignment代写,Dissertation代写,Report代写,小组作业代写,Proposal代写,Paper代写,Presentation代写,计算机作业代写,论文修改和润色,网课代做,exam代考等等。写作范围涵盖高中,本科,研究生等海外留学全阶段,辐射金融,经济学,会计学,审计学,管理学等全球99%专业科目。写作团队既有专业英语母语作者,也有海外名校硕博留学生,每位写作老师都拥有过硬的语言能力,专业的学科背景和学术写作经验。我们承诺100%原创,100%专业,100%准时,100%满意。
随机分析代写
随机微积分是数学的一个分支,对随机过程进行操作。它允许为随机过程的积分定义一个关于随机过程的一致的积分理论。这个领域是由日本数学家伊藤清在第二次世界大战期间创建并开始的。
时间序列分析代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其时间序列是一组按照时间发生先后顺序进行排列的数据点序列。通常一组时间序列的时间间隔为一恒定值(如1秒,5分钟,12小时,7天,1年),因此时间序列可以作为离散时间数据进行分析处理。研究时间序列数据的意义在于现实中,往往需要研究某个事物其随时间发展变化的规律。这就需要通过研究该事物过去发展的历史记录,以得到其自身发展的规律。
回归分析代写
多元回归分析渐进(Multiple Regression Analysis Asymptotics)属于计量经济学领域,主要是一种数学上的统计分析方法,可以分析复杂情况下各影响因素的数学关系,在自然科学、社会和经济学等多个领域内应用广泛。
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。