如果你也在 怎样代写理论力学Theoretical Mechanics这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。
理论力学是研究物质的运动和导致这种运动的力量。它被应用于分析任何动态系统,从原子到太阳系。薄壁管的应力、变形和稳定性分析是物理学和工程学的一个经典课题。
statistics-lab™ 为您的留学生涯保驾护航 在代写理论力学Theoretical Mechanics方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在代写理论力学Theoretical Mechanics代写方面经验极为丰富,各种代写理论力学Theoretical Mechanics相关的作业也就用不着说。
我们提供的理论力学Theoretical Mechanics及其相关学科的代写,服务范围广, 其中包括但不限于:
- Statistical Inference 统计推断
- Statistical Computing 统计计算
- Advanced Probability Theory 高等概率论
- Advanced Mathematical Statistics 高等数理统计学
- (Generalized) Linear Models 广义线性模型
- Statistical Machine Learning 统计机器学习
- Longitudinal Data Analysis 纵向数据分析
- Foundations of Data Science 数据科学基础
物理代写|理论力学作业代写Theoretical Mechanics代考|Parametrization of Space Curves
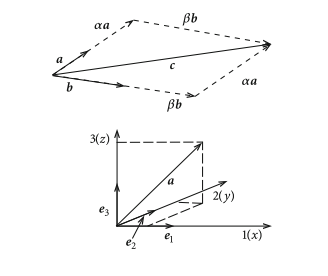
In physics space curves are typical examples of vector-valued functions. To start with we choose in the $E_{3}$ an arbitrary but fixed origin of coordinates $\mathcal{O}$. Then the momentary position $P$ of a ‘particle’ is determined by the position vector $\mathbf{r}=\overrightarrow{0 P}$ (Fig. 1.57). By a ‘particle’ we understand a physical body of mass $m$ but with negligible extension in all directions. Later we will introduce for it the term ‘mass point’. In course of time the particle will in general change its position, i.e. $\mathbf{r}$ will change direction and magnitude. In a time-independent, complete orthonormal system (CONS) $\mathbf{e}_{i}$ the components of the position vector become normal time-
dependent functions:
$$
\mathbf{r}(t)=\sum_{j=1}^{3} x_{j}(t) \mathbf{e}{j} \equiv\left(x{1}(t), x_{2}(t), x_{3}(t)\right)
$$
This is called the trajectory or the path line of the particle.
The set of space points the particle passes through over the time define the socalled
$$
\text { space curve : }=\left{\mathbf{r}(t), t_{a} \leq t \leq t_{e}\right} \text {. }
$$
One calls (1.202) a parametrization of the space curve (1.203). The independent parameter in this case is the time $t$. Of course there also exist other possibilities of parametrization as we will see later in this section. Furthermore, it is clear that different path lines may parametrize the same space curve. For example this is already true when one and the same space curve is run through in opposite directions or in different time intervals.
Examples
- Circular motion in the $x z$-plane
Let the circle have the radius $R$ and let its center point be at the origin of coordinates (Fig. 1.58). Then a self-evident parametrization is via the angle $\varphi$ :
$$
\begin{aligned}
&M={\varphi ; \quad 0 \leq \varphi \leq 2 \pi}, \
&\mathbf{r}(\varphi)=R(\cos \varphi, 0, \sin \varphi)
\end{aligned}
$$
Another parametrization can use, e.g., the $x$ component $x_{1}$ :
$$
\begin{aligned}
&M=\left{x_{1} ; \quad-R \leq x_{1} \leq+R\right}, \
&\mathbf{r}\left(x_{1}\right)=\left(x_{1}, 0, \pm \sqrt{R^{2}-x_{1}^{2}}\right)
\end{aligned}
$$
where the plus sign holds for the upper, the minus sign for the lower half-plane.
物理代写|理论力学作业代写Theoretical Mechanics代考|Differentiation of Vector-Valued Functions
We consider a vector-valued function $\mathbf{a}(t)$ and look into the differential changes of the vector, i.e. the changes due to very small changes in time. Practically such a time interval, being determined by the measuring process, is of course always finite. Mathematically, however, an infinitely small time interval shall be considered. Furthermore, instead of time $t$ any other parameter can also be used in the following formulae. The vector-valued function $\mathbf{a}(t)$ in general has at different times (parameters) $t$ and $t+\Delta t$ different magnitudes and/or different directions. The magnitude of the difference vector
$$
\Delta \mathbf{a}=\mathbf{a}(t+\Delta t)-\mathbf{a}(t)
$$
will become smaller with decreasing time difference $\Delta t$, whereby its direction can change continuously in order to arrive for very small $\Delta t$ in the corresponding direction of the respective tangent.
Definition 1.4.2 Derivation of a Vector-Valued Function
$$
\frac{d \mathbf{a}}{d t}=\lim _{\Delta t \rightarrow 0} \frac{\mathbf{a}(t+\Delta t)-\mathbf{a}(t)}{\Delta t} .
$$
This definition clearly presumes that such a limiting vector does exist at all (Fig. 1.60). For time-derivatives sometimes one writes briefly:
$$
\dot{\mathbf{a}}(t) \equiv \frac{d \mathbf{a}}{d t}
$$
We represent $\mathbf{a}(t)$ in a time-independent basis system $\left{\mathbf{e}{i}\right}$ : $$ \mathbf{a}(t)=\sum{j} a_{j}(t) \mathbf{e}{j} . $$ Then it holds: $$ \mathbf{a}(t+\Delta t)-\mathbf{a}(t)=\sum{j}\left[a_{j}(t+\Delta t)-a_{j}(t)\right] \mathbf{e}{j} . $$ Therewith the differentiation of a vector-valued function is obviously and completely expressed in terms of derivatives of the time-dependent component functions: $$ \dot{\mathbf{a}}(t)=\frac{d \mathbf{a}}{d i}=\sum{j} \dot{a}{j}(t) \mathbf{e}{j}
$$
Correspondingly it holds also for all higher derivatives:
$$
\frac{d^{n}}{d t^{n}} \mathbf{a}(t)=\sum_{j}\left(\frac{d^{n}}{d t^{n}} a_{j}(t)\right) \mathbf{e}_{j} ; \quad n=0,1,2, \ldots
$$
Then it is not difficult to prove the following rules of differentiation
1) $\frac{d}{d t}[\mathbf{a}(t)+\mathbf{b}(t)]=\dot{\mathbf{a}}(t)+\dot{\mathbf{b}}(t)$,
2) $\frac{d}{d t}[f(t) \mathbf{a}(t)]=\dot{f}(t) \mathbf{a}(t)+f(t) \dot{\mathbf{a}}(t)$,
if $f(t)$ is a differentiable, scalar function,
3) $\frac{d}{d t}[\mathbf{a}(t) \cdot \mathbf{b}(t)]=\dot{\mathbf{a}}(t) \cdot \mathbf{b}(t)+\mathbf{a}(t) \cdot \dot{\mathbf{b}}(t)$,
4) $\frac{d}{d t}[\mathbf{a}(t) \times \mathbf{b}(t)]=\dot{\mathbf{a}}(t) \times \mathbf{b}(t)+\mathbf{a}(t) \times \dot{\mathbf{b}}(t)$.
In 4) we have to be very careful about the correct order of the factors.
Examples
a) velocity: $\mathbf{v}(t)=\dot{\mathbf{r}}(t)$
(always tangential to the path line),
acceleration: $\mathbf{a}(t)=\dot{\mathbf{v}}(t)=\ddot{\mathbf{r}}(t)$.
(1.215)
物理代写|理论力学作业代写Theoretical Mechanics代考|Arc Length
The integration of vector-valued functions can also be transferred to the corresponding integration of parameter-dependent component functions:
$$
\int_{t_{a}}^{t_{e}} \mathbf{a}(t) d t=\sum_{j=1}^{3} \mathbf{e}{j} \int{t_{a}}^{t_{e}} a_{j}(t) d t
$$
If the basis vectors are parameter-independent they can be drawn in front of the integral Thus in cuch a case nne integrates the vertor hy integrating its components in the ordinary manner. However, is should be expressly indicaled that the so defined integral of course depends on the special choice of the parameters and therefore does not at all represent a genuine curve property. During the course of this book we will meet other integrals of totally different type. However, at this stage we will make do with (1.217).
From now on, temporarily, we want to concentrate ourselves exclusively on space curves and path lines as examples of vector-valued functions. Thereby we assume for the following that the curve under consideration is ‘smooth’.
Definition 1.4.3 A space curve is denoted as smooth, if there exists at least one continuously differentiable parametrization $\mathbf{r}=\mathbf{r}(t)$ for which at no point we have:
$$
\frac{d \mathbf{r}}{d t}=0
$$
For such smooth space curves it often appears convenient to use the so-called arc length $s$ as curve parameter.
Definition 1.4.4 The arc length $s$ is the length of the space curve, measured along the curved line starting from an arbitrarily chosen initial point.
理论力学代写
物理代写|理论力学作业代写Theoretical Mechanics代考|Parametrization of Space Curves
在物理空间曲线是向量值函数的典型例子。首先,我们选择和3任意但固定的坐标原点这. 然后是瞬间位置磷“粒子”的大小由位置向量确定r=0磷→(图 1.57)。通过“粒子”,我们理解了一个物理质量体米但在各个方向上的延伸都可以忽略不计。稍后我们将为其引入术语“质点”。随着时间的推移,粒子通常会改变它的位置,即r会改变方向和幅度。在与时间无关的完全正交系统 (CONS) 中和一世位置向量的分量变为正常时间-
依赖函数:
r(吨)=∑j=13Xj(吨)和j≡(X1(吨),X2(吨),X3(吨))
这称为粒子的轨迹或路径线。
粒子随时间经过的空间点集合定义了所谓的
\text { 空间曲线 : }=\left{\mathbf{r}(t), t_{a} \leq t \leq t_{e}\right} \text {. }\text { 空间曲线 : }=\left{\mathbf{r}(t), t_{a} \leq t \leq t_{e}\right} \text {. }
有人称 (1.202) 为空间曲线 (1.203) 的参数化。这种情况下的独立参数是时间吨. 当然,我们将在本节后面看到,还存在其他参数化的可能性。此外,很明显,不同的路径线可以参数化相同的空间曲线。例如,当一条相同的空间曲线以相反的方向或不同的时间间隔穿过时,这已经是正确的了。
例子
- 在圆周运动X和-plane
让圆有半径R并使其中心点位于坐标原点(图 1.58)。然后一个不言而喻的参数化是通过角度披 :
米=披;0≤披≤2圆周率, r(披)=R(因披,0,罪披)
另一个参数化可以使用,例如,X零件X1:
\begin{aligned} &M=\left{x_{1} ; \quad-R \leq x_{1} \leq+R\right}, \ &\mathbf{r}\left(x_{1}\right)=\left(x_{1}, 0, \pm \sqrt {R^{2}-x_{1}^{2}}\right) \end{对齐}\begin{aligned} &M=\left{x_{1} ; \quad-R \leq x_{1} \leq+R\right}, \ &\mathbf{r}\left(x_{1}\right)=\left(x_{1}, 0, \pm \sqrt {R^{2}-x_{1}^{2}}\right) \end{对齐}
其中加号适用于上半平面,减号适用于下半平面。
物理代写|理论力学作业代写Theoretical Mechanics代考|Differentiation of Vector-Valued Functions
我们考虑一个向量值函数一种(吨)并查看向量的微分变化,即由于时间非常小的变化引起的变化。实际上,由测量过程确定的这种时间间隔当然总是有限的。然而,在数学上,应考虑无限小的时间间隔。此外,而不是时间吨任何其他参数也可以在以下公式中使用。向量值函数一种(吨)一般来说,在不同的时间(参数)吨和吨+Δ吨不同的幅度和/或不同的方向。差向量的大小
Δ一种=一种(吨+Δ吨)−一种(吨)
会随着时间差的减小而变小Δ吨, 从而它的方向可以连续改变以达到非常小的Δ吨在相应切线的相应方向上。
定义 1.4.2 向量值函数的推导
d一种d吨=林Δ吨→0一种(吨+Δ吨)−一种(吨)Δ吨.
这个定义清楚地假定这样一个限制向量确实存在(图 1.60)。对于时间导数,有时人们会简短地写道:
一种˙(吨)≡d一种d吨
我们代表一种(吨)在时间无关的基系统中\left{\mathbf{e}{i}\right}\left{\mathbf{e}{i}\right} :
一种(吨)=∑j一种j(吨)和j.然后它成立:
一种(吨+Δ吨)−一种(吨)=∑j[一种j(吨+Δ吨)−一种j(吨)]和j.因此,向量值函数的微分显然完全用时间相关分量函数的导数表示:
一种˙(吨)=d一种d一世=∑j一种˙j(吨)和j
相应地,它也适用于所有高级导数:
dnd吨n一种(吨)=∑j(dnd吨n一种j(吨))和j;n=0,1,2,…
那么不难证明以下微分规则
1)dd吨[一种(吨)+b(吨)]=一种˙(吨)+b˙(吨),
2) dd吨[F(吨)一种(吨)]=F˙(吨)一种(吨)+F(吨)一种˙(吨),
如果F(吨)是一个可微的标量函数,
3)dd吨[一种(吨)⋅b(吨)]=一种˙(吨)⋅b(吨)+一种(吨)⋅b˙(吨),
4) dd吨[一种(吨)×b(吨)]=一种˙(吨)×b(吨)+一种(吨)×b˙(吨).
4)我们必须非常小心因素的正确顺序。
示例
a) 速度:在(吨)=r˙(吨)
(总是与路径线相切),
加速度:一种(吨)=在˙(吨)=r¨(吨).
(1.215)
物理代写|理论力学作业代写Theoretical Mechanics代考|Arc Length
向量值函数的积分也可以转化为参数相关分量函数的相应积分:
∫吨一种吨和一种(吨)d吨=∑j=13和j∫吨一种吨和一种j(吨)d吨
如果基向量是参数无关的,它们可以画在积分前面。因此,在这种情况下,nne 以普通方式积分它的分量。然而,应该明确指出,如此定义的积分当然取决于参数的特殊选择,因此根本不代表真正的曲线特性。在本书的过程中,我们将遇到其他完全不同类型的积分。但是,在这个阶段,我们将使用 (1.217)。
从现在开始,我们暂时只专注于空间曲线和路径线作为向量值函数的示例。因此,我们假设所考虑的曲线是“平滑的”。
定义 1.4.3 如果存在至少一个连续可微参数化,则空间曲线表示为平滑的r=r(吨)我们绝对没有:
drd吨=0
对于这种光滑的空间曲线,使用所谓的弧长通常看起来很方便s作为曲线参数。
定义 1.4.4 弧长s是空间曲线的长度,从任意选择的初始点开始沿曲线测量。

统计代写请认准statistics-lab™. statistics-lab™为您的留学生涯保驾护航。
金融工程代写
金融工程是使用数学技术来解决金融问题。金融工程使用计算机科学、统计学、经济学和应用数学领域的工具和知识来解决当前的金融问题,以及设计新的和创新的金融产品。
非参数统计代写
非参数统计指的是一种统计方法,其中不假设数据来自于由少数参数决定的规定模型;这种模型的例子包括正态分布模型和线性回归模型。
广义线性模型代考
广义线性模型(GLM)归属统计学领域,是一种应用灵活的线性回归模型。该模型允许因变量的偏差分布有除了正态分布之外的其它分布。
术语 广义线性模型(GLM)通常是指给定连续和/或分类预测因素的连续响应变量的常规线性回归模型。它包括多元线性回归,以及方差分析和方差分析(仅含固定效应)。
有限元方法代写
有限元方法(FEM)是一种流行的方法,用于数值解决工程和数学建模中出现的微分方程。典型的问题领域包括结构分析、传热、流体流动、质量运输和电磁势等传统领域。
有限元是一种通用的数值方法,用于解决两个或三个空间变量的偏微分方程(即一些边界值问题)。为了解决一个问题,有限元将一个大系统细分为更小、更简单的部分,称为有限元。这是通过在空间维度上的特定空间离散化来实现的,它是通过构建对象的网格来实现的:用于求解的数值域,它有有限数量的点。边界值问题的有限元方法表述最终导致一个代数方程组。该方法在域上对未知函数进行逼近。[1] 然后将模拟这些有限元的简单方程组合成一个更大的方程系统,以模拟整个问题。然后,有限元通过变化微积分使相关的误差函数最小化来逼近一个解决方案。
tatistics-lab作为专业的留学生服务机构,多年来已为美国、英国、加拿大、澳洲等留学热门地的学生提供专业的学术服务,包括但不限于Essay代写,Assignment代写,Dissertation代写,Report代写,小组作业代写,Proposal代写,Paper代写,Presentation代写,计算机作业代写,论文修改和润色,网课代做,exam代考等等。写作范围涵盖高中,本科,研究生等海外留学全阶段,辐射金融,经济学,会计学,审计学,管理学等全球99%专业科目。写作团队既有专业英语母语作者,也有海外名校硕博留学生,每位写作老师都拥有过硬的语言能力,专业的学科背景和学术写作经验。我们承诺100%原创,100%专业,100%准时,100%满意。
随机分析代写
随机微积分是数学的一个分支,对随机过程进行操作。它允许为随机过程的积分定义一个关于随机过程的一致的积分理论。这个领域是由日本数学家伊藤清在第二次世界大战期间创建并开始的。
时间序列分析代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其时间序列是一组按照时间发生先后顺序进行排列的数据点序列。通常一组时间序列的时间间隔为一恒定值(如1秒,5分钟,12小时,7天,1年),因此时间序列可以作为离散时间数据进行分析处理。研究时间序列数据的意义在于现实中,往往需要研究某个事物其随时间发展变化的规律。这就需要通过研究该事物过去发展的历史记录,以得到其自身发展的规律。
回归分析代写
多元回归分析渐进(Multiple Regression Analysis Asymptotics)属于计量经济学领域,主要是一种数学上的统计分析方法,可以分析复杂情况下各影响因素的数学关系,在自然科学、社会和经济学等多个领域内应用广泛。
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。