如果你也在 怎样代写最优化Optimization Theory 这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。最优化Optimization Theory是致力于解决优化问题的数学分支。 优化问题是我们想要最小化或最大化函数值的数学函数。 这些类型的问题在计算机科学和应用数学中大量存在。
最优化Optimization Theory每个优化问题都包含三个组成部分:目标函数、决策变量和约束。 当人们谈论制定优化问题时,它意味着将“现实世界”问题转化为包含这三个组成部分的数学方程和变量。目标函数,通常表示为 f 或 z,反映要最大化或最小化的单个量。交通领域的例子包括“最小化拥堵”、“最大化安全”、“最大化可达性”、“最小化成本”、“最大化路面质量”、“最小化排放”、“最大化收入”等等。
statistics-lab™ 为您的留学生涯保驾护航 在代写最优化理论optimization theory方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在代写最优化理论optimization theory代写方面经验极为丰富,各种代写最优化理论optimization theory相关的作业也就用不着说。
数学代写|最优化理论作业代写optimization theory代考|MINIMUM CONTROL-EFFORT PROBLEMS
In the preceding section we considered problems in which the objective was to transfer a system from an arbitrary initial state to a specific target set as quickly as possible. Let us now consider problems in which control effort required, rather than elapsed time, is the criterion of optimality. Such problems arise frequently in aerospace applications, where often there are limited control resources available for achieving desired objectives.
The class of problems we will discuss is the following: Find a control $\mathbf{u}^*(t)$ satisfying constraints of the form
$$
M_{i_{-}} \leq u_i(t) \leq M_{i+}, \quad i=1,2, \ldots, m
$$
which transfers a system described by
$$
\dot{\mathbf{x}}(t)=\mathbf{a}(\mathbf{x}(t), \mathbf{u}(t), t)
$$
from an arbitrary initial state $x_0$ to a specified target set $S(t)$ with a minimum expenditure of control effort.
As measures of control effort we shall consider the two performance indices
$$
J_1(\mathbf{u})=\int_{t_0}^{t_s}\left[\sum_i^m \beta_i\left|u_i(t)\right|\right] d t
$$
and
$$
J_2(\mathbf{1})=\int_{t_0}^{t r}\left[\sum_{i=1}^m r_i u_i^2(t)\right] d t,
$$
where $\beta_i$ and $r_i, i=1, \ldots, m$, are nonnegative weighting factors. As discussed in Chapter 2 , the fuel consumed by a mass-expulsion thrusting system is often expressed by an integral of the form (5.5-3); thus, if a performance measure to be minimized has the form given by $J_1$, we shall refer to the problem as a minimum-fuel problem. The total electrical energy supplied to a network of resistors by several voltage and current sources is given by an integral of the form (5.5-4); hence, if a performance measure of this form is to be minimized, we shall say that we wish to solve a minimum-energy problem. The reader must be cautioned that in a particular problem (5.5-3) may not represent fuel expenditure, or control energy required may not be given by (5.5-4); therefore, the results obtained in this section will apply to the performance measure $J_1$ or $J_2$, not necessarily to the problems of minimizing fuel or energy consumption.
数学代写|最优化理论作业代写optimization theory代考|Minimum-Fuel Problems
In our discussion of minimum-time problems in Section 5.4 the concept of reachable states was introduced. Recall that $R(t)$ was used to denote the set of states that can be reached at time $t$ by starting from an initial state $\mathbf{x}_0$ at time $t_0$. Minimum-fuel problems may also be visualized in terms of reachable states; that is, the minimum-fuel solution is given by the intersection of the target set $S(t)$ with the set of reachable states $R(t)$, which requires the smallest amount of consumed fuel. To represent this idea geometrically we could use a state-time-consumed-fuel coordinate system and determine the intersections (if any) of $S(t)$ and $R(t)$. Unfortunately, although such a geometric representation is helpful as a conceptual device, it is of limited value in actually obtaining solutions. Instead of pursuing this avenue further, we shall approach minimum control-effort problems by starting with the necessary conditions provided by Pontryagin’s minimum principle.
The Form of the Optimal Control for a Class of Minimum-Fuel Problems. Let us assume that the state equations of a system are of the form
$$
\dot{\mathbf{x}}(t)=\mathbf{a}(\mathbf{x}(t), t)+\mathbf{B}(\mathbf{x}(t), t) \mathbf{u}(t),
$$
where $\mathbf{B}$ is an $n \times m$ array that may be explicitly dependent on the states and time. The performance measure to be minimized is
$$
J(\mathbf{u})=\int_{t_0}^{t_t}\left[\sum_{i=1}^m\left|u_i(t)\right|\right] d t
$$
and the admissible controls are to satisfy the constraints
$$
-1 \leq u_i(t) \leq+1, \quad i=1,2, \ldots, m, \quad t \in\left[t_0, t_f\right]
$$
最优化理论代写
数学代写|最优化理论作业代写optimization theory代考|MINIMUM CONTROL-EFFORT PROBLEMS
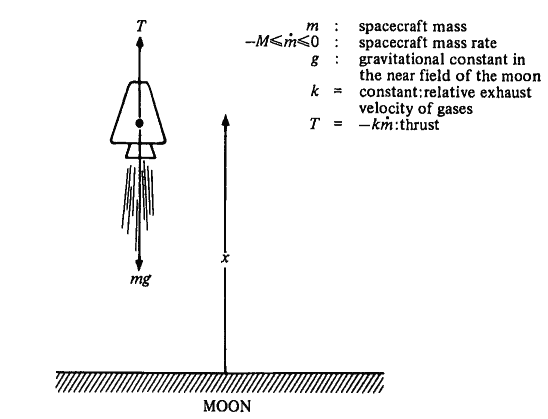
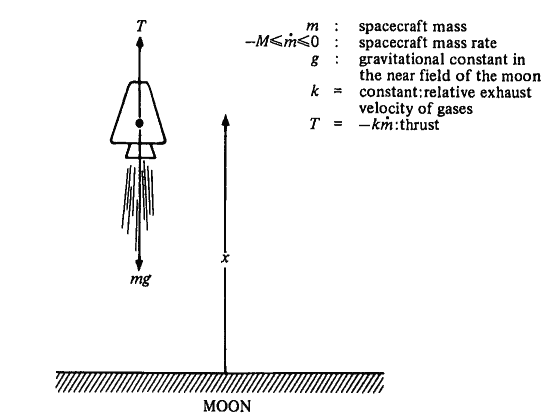
在前面的部分中,我们考虑了一些问题,其中的目标是将系统从任意初始状态转移到尽可能快的特定目标集。现在让我们考虑一些问题,其中所需的控制努力,而不是消耗的时间,是最优性的标准。这类问题在航空航天应用中经常出现,在这些应用中,用于实现预期目标的控制资源往往有限。
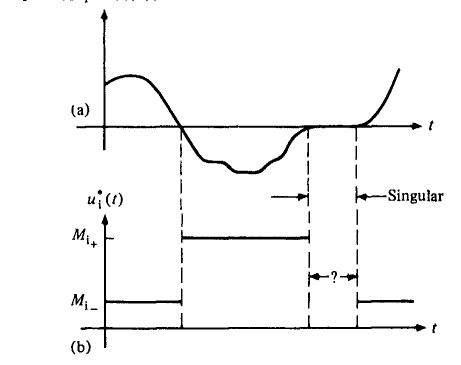
我们将要讨论的一类问题是:找到一个满足以下形式约束的控件$\mathbf{u}^*(t)$
$$
M_{i_{-}} \leq u_i(t) \leq M_{i+}, \quad i=1,2, \ldots, m
$$
哪个传输系统由
$$
\dot{\mathbf{x}}(t)=\mathbf{a}(\mathbf{x}(t), \mathbf{u}(t), t)
$$
从任意的初始状态$x_0$到指定的目标集$S(t)$,花费最少的控制努力。
作为控制努力的度量,我们将考虑两个绩效指标
$$
J_1(\mathbf{u})=\int_{t_0}^{t_s}\left[\sum_i^m \beta_i\left|u_i(t)\right|\right] d t
$$
和
$$
J_2(\mathbf{1})=\int_{t_0}^{t r}\left[\sum_{i=1}^m r_i u_i^2(t)\right] d t,
$$
其中$\beta_i$和$r_i, i=1, \ldots, m$为非负权重因子。如第2章所讨论的,一个大规模驱逐推力系统所消耗的燃料通常用(5.5-3)式的积分表示;因此,如果要最小化的性能度量具有$J_1$给出的形式,我们将把该问题称为最小燃料问题。若干电压和电流源提供给电阻器网络的总电能由(5.5-4)式的积分给出;因此,如果要使这种形式的性能度量最小化,我们就可以说我们希望解决最小能量问题。读者必须注意,在一个特定的问题(5.5-3)可能不代表燃料消耗,或控制所需的能量可能不会给出(5.5-4);因此,本节中获得的结果将适用于性能度量$J_1$或$J_2$,而不一定适用于最小化燃料或能源消耗的问题。
数学代写|最优化理论作业代写optimization theory代考|Minimum-Fuel Problems
在第5.4节讨论最小时间问题时,引入了可达状态的概念。回想一下,$R(t)$是用来表示在时间$t$时可以从时间$t_0$的初始状态$\mathbf{x}_0$开始到达的一组状态。最小燃料问题也可以用可达状态来可视化;也就是说,最小燃料解由目标集$S(t)$与可达状态集$R(t)$的交集给出,这需要消耗最少的燃料。为了从几何上表示这个想法,我们可以使用状态-时间-燃料坐标系并确定$S(t)$和$R(t)$的交点(如果有的话)。不幸的是,尽管这种几何表示作为一种概念手段是有帮助的,但它在实际求解中价值有限。我们将从庞特里亚金最小原理所提供的必要条件入手,来探讨最小控制努力问题,而不是进一步探讨这条道路。
一类最小燃料问题的最优控制形式。我们假设一个系统的状态方程是这样的
$$
\dot{\mathbf{x}}(t)=\mathbf{a}(\mathbf{x}(t), t)+\mathbf{B}(\mathbf{x}(t), t) \mathbf{u}(t),
$$
其中$\mathbf{B}$是一个$n \times m$数组,可以显式地依赖于状态和时间。要最小化的性能度量是
$$
J(\mathbf{u})=\int_{t_0}^{t_t}\left[\sum_{i=1}^m\left|u_i(t)\right|\right] d t
$$
允许的控制是满足约束条件
$$
-1 \leq u_i(t) \leq+1, \quad i=1,2, \ldots, m, \quad t \in\left[t_0, t_f\right]
$$

统计代写请认准statistics-lab™. statistics-lab™为您的留学生涯保驾护航。
金融工程代写
金融工程是使用数学技术来解决金融问题。金融工程使用计算机科学、统计学、经济学和应用数学领域的工具和知识来解决当前的金融问题,以及设计新的和创新的金融产品。
非参数统计代写
非参数统计指的是一种统计方法,其中不假设数据来自于由少数参数决定的规定模型;这种模型的例子包括正态分布模型和线性回归模型。
广义线性模型代考
广义线性模型(GLM)归属统计学领域,是一种应用灵活的线性回归模型。该模型允许因变量的偏差分布有除了正态分布之外的其它分布。
术语 广义线性模型(GLM)通常是指给定连续和/或分类预测因素的连续响应变量的常规线性回归模型。它包括多元线性回归,以及方差分析和方差分析(仅含固定效应)。
有限元方法代写
有限元方法(FEM)是一种流行的方法,用于数值解决工程和数学建模中出现的微分方程。典型的问题领域包括结构分析、传热、流体流动、质量运输和电磁势等传统领域。
有限元是一种通用的数值方法,用于解决两个或三个空间变量的偏微分方程(即一些边界值问题)。为了解决一个问题,有限元将一个大系统细分为更小、更简单的部分,称为有限元。这是通过在空间维度上的特定空间离散化来实现的,它是通过构建对象的网格来实现的:用于求解的数值域,它有有限数量的点。边界值问题的有限元方法表述最终导致一个代数方程组。该方法在域上对未知函数进行逼近。[1] 然后将模拟这些有限元的简单方程组合成一个更大的方程系统,以模拟整个问题。然后,有限元通过变化微积分使相关的误差函数最小化来逼近一个解决方案。
tatistics-lab作为专业的留学生服务机构,多年来已为美国、英国、加拿大、澳洲等留学热门地的学生提供专业的学术服务,包括但不限于Essay代写,Assignment代写,Dissertation代写,Report代写,小组作业代写,Proposal代写,Paper代写,Presentation代写,计算机作业代写,论文修改和润色,网课代做,exam代考等等。写作范围涵盖高中,本科,研究生等海外留学全阶段,辐射金融,经济学,会计学,审计学,管理学等全球99%专业科目。写作团队既有专业英语母语作者,也有海外名校硕博留学生,每位写作老师都拥有过硬的语言能力,专业的学科背景和学术写作经验。我们承诺100%原创,100%专业,100%准时,100%满意。
随机分析代写
随机微积分是数学的一个分支,对随机过程进行操作。它允许为随机过程的积分定义一个关于随机过程的一致的积分理论。这个领域是由日本数学家伊藤清在第二次世界大战期间创建并开始的。
时间序列分析代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其时间序列是一组按照时间发生先后顺序进行排列的数据点序列。通常一组时间序列的时间间隔为一恒定值(如1秒,5分钟,12小时,7天,1年),因此时间序列可以作为离散时间数据进行分析处理。研究时间序列数据的意义在于现实中,往往需要研究某个事物其随时间发展变化的规律。这就需要通过研究该事物过去发展的历史记录,以得到其自身发展的规律。
回归分析代写
多元回归分析渐进(Multiple Regression Analysis Asymptotics)属于计量经济学领域,主要是一种数学上的统计分析方法,可以分析复杂情况下各影响因素的数学关系,在自然科学、社会和经济学等多个领域内应用广泛。
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。